M.Sc. Mechatronics · TUHH · Hamburg
this is where
hardware meets
intelligence.
Selected Works
Articulated Motion Planning (Nav2)
Adapting the ROS2 Nav2 framework for dual-body rovers integrating custom motion models and hinge-aware collision checking.

Multi-Robot Task Planning
Dynamic Behavior-Tree framework for autonomous inspection with multiple quadruped robots via ROS namespaces.
Image-Guided Needle Placement
Implemented trajectory planning and kinematics for a Franka Panda robotic arm to perform precise image-guided needle insertions.
Non-Visual Perception System
Built a non-visual perception stack for a UGV using ultrasonic, force, and IMU sensors for real-time motion adaptation.
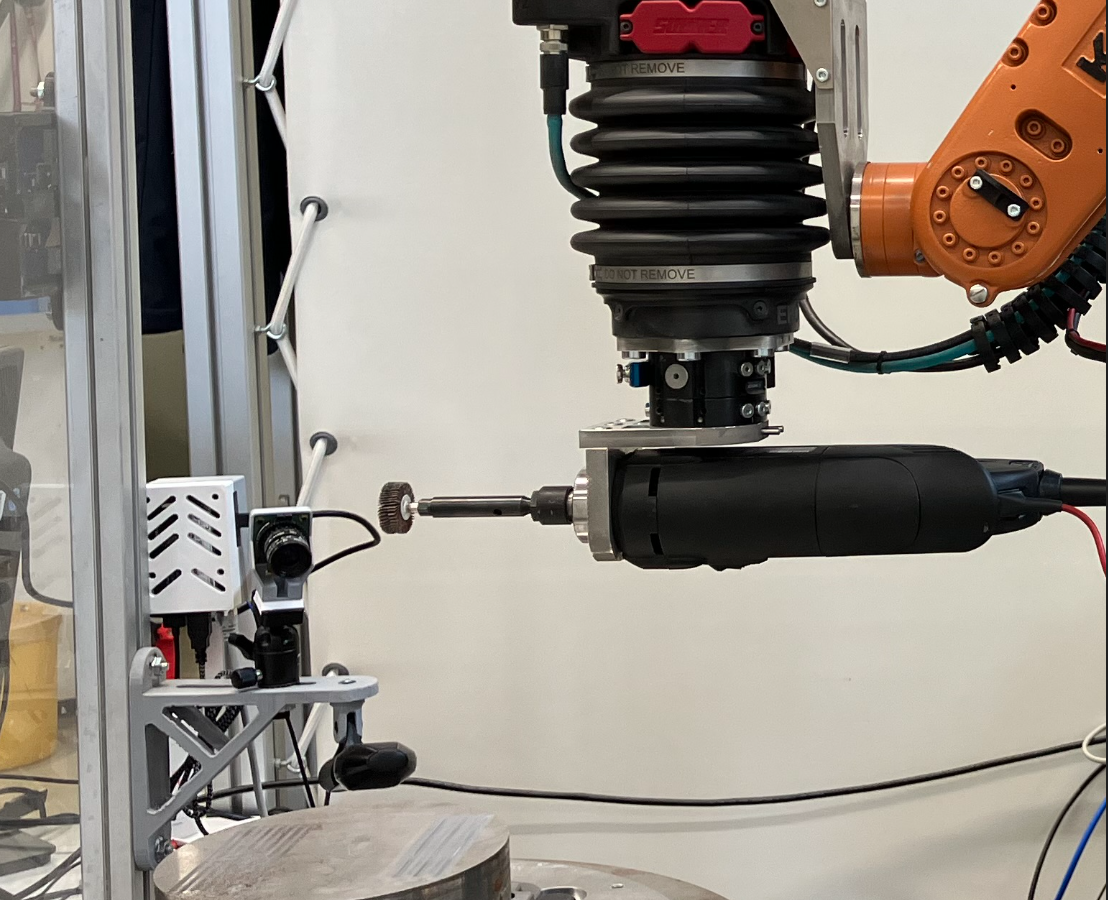
Flapwheel Anomaly Detection
Convolutional Autoencoder (CAE) based anomaly detection system to inspect flap wheels for structural defects.
Autonomous Maze Solver
Developed an autonomous maze-solving LEGO Mindstorms robot using Java and object-oriented programming principles.

About Me
My journey into robotics did not start in a computer lab. It began on the manufacturing floor at Suzuki. Coming from a mechanical engineering background, I spent my time surrounded by heavy industrial robots building cars. That exposure sparked a deep curiosity, as I did not just want to know how they moved mechanically. I wanted to understand the logic that drove their decisions. What started as pure curiosity quickly accelerated into a dedicated career path.
Currently pursuing my Master's in Mechatronics at TUHH in Hamburg, my focus sits firmly at the intersection of robotics and artificial intelligence. I am deeply interested in Physical AI and the challenge of building systems that bridge the gap between high-level intelligent reasoning and robust real-world execution. Rather than isolating myself to a single software node, my ultimate goal is to master the complete robotics pipeline. From perception and spatial comprehension down to low-level navigation and control, I want to understand the entire autonomy stack.
Beyond the lab, I stay active by playing football and love exploring historically significant places whenever I travel. I also enjoy cooking and am an avid listener of podcasts, diving into a wide array of topics that span history, food, travel, science, and robotics.
Experience
11/2025 — 02/2026
Student Tutor · IDAC, TUHH
Assisted in teaching the Bauinformatik Datenbanken seminar, guiding students through database design, ER modeling, and SQL fundamentals.
07/2024 — 03/2025 & 08/2025 — 10/2025
Student Research Assistant · IDAC, TUHH
Setting up simulation environments for Husky UGVs and UR5e arms, and researching Behavior Trees for multi-robot task assignment.
10/2023 — 09/2025
Student Research Assistant · IFPT, TUHH
Integrating Beckhoff IPCs into robotic platforms and developing neural networks for anomaly detection in automated manufacturing setups.
09/2021 — 04/2022
Graduate Engineer Trainee · Suzuki Motor Gujarat Pvt. Ltd.
Updated weld shop layouts, coordinated robot teaching operations, and executed pre-production trials for new car models.
Publications
let's build
something cool.
© 2026 Saurabh Sawant · Robotics Engineer